What is the DeepTask?

DeepTask는 로봇-사용자간 사회적 상호작용 가능한 소셜 지능의 지식화, 인식, 표현 기술 및 서비스 패키지 생성 기술 개발을 목적으로 하는 프로젝트입니다. 로봇이 사회적 단서 해독 능력을 갖고, 사회성 모델에 근거해 현재의 환경을 이해하고, 사회적인 의사 표현을 하기 위한 방법을 제시합니다.
We present a way for robots to have the ability to decipher social cues, to understand the current environment based on the sociability model, and to express social expression. We propose a system for robot to do social perception, understand a environment based on sociality model and act with social action.
- 사회성(Sociality) : 환경에 적합한 행동을 나타내는 적응 과정(Adaptation process that represents the behavior appropriate for a environment)
- 사회적 상호작용(Social Interaction) : 자신과 타인의 사회도덕적 관계, 사회 제도를 이해하고 상호작용 하는것(Interaction with social norms and understanding relationship between self and others)
System Structure
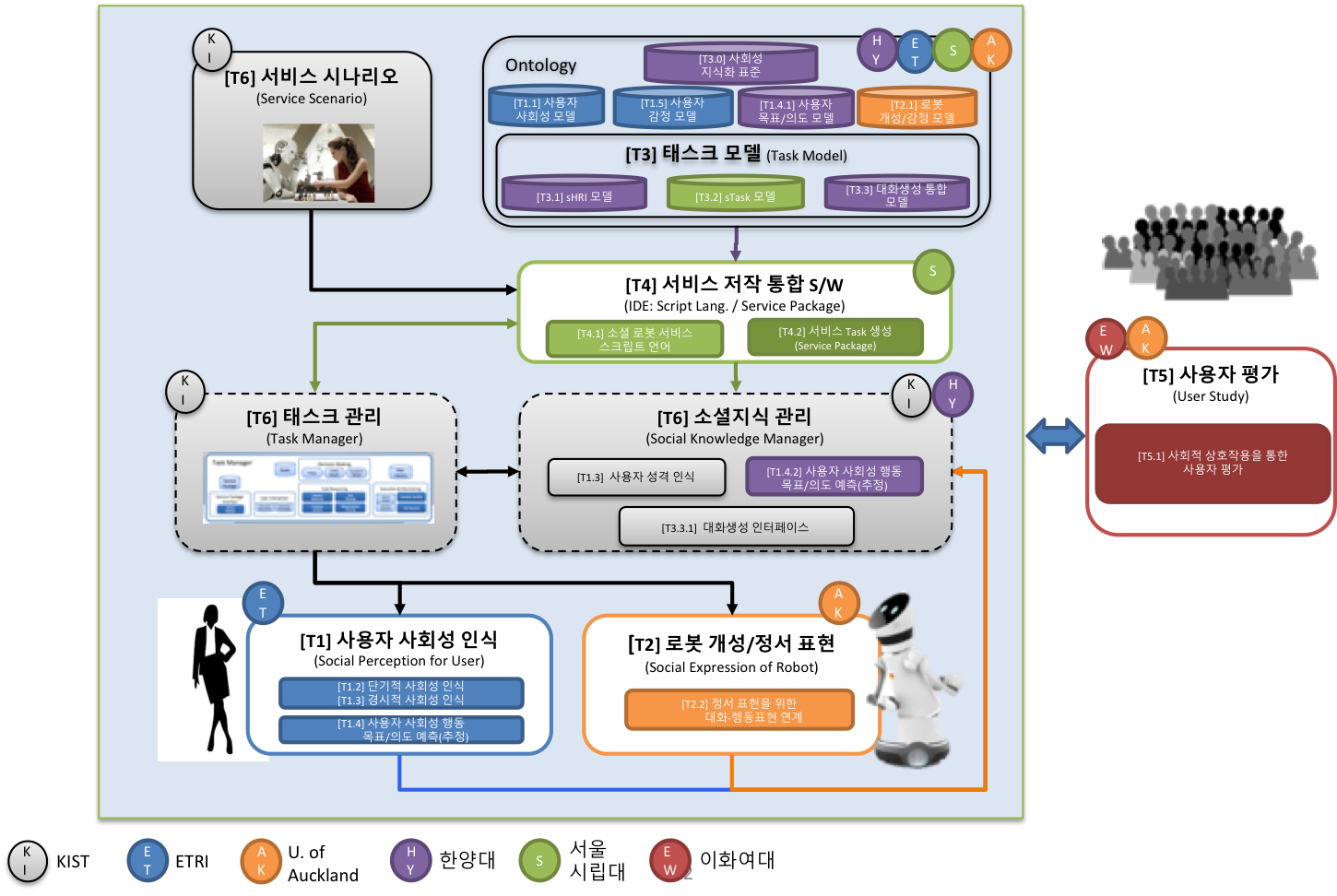
사회적 인간-로봇 상호작용을 위한 심층이해 기반의 지식 및 태스크 모델링 시스템. 아래는 시스템 내 각각 모듈들의 연구 기관입니다.
Deep understanding-based modeling system of Task and Knowledge For Social human-robot interaction. Below are the research institutes of each module in the system.
- [T1] 사용자 사회성 인식(Social Perception for User) - Electronics and Telecommunications Research Institute
- [T2] 로봇 개성/정서 표현(Social Expression of Robot) - University of Auckland
- [T3] 태스크 모델(Task Model) - Hanyang University
- [T4] 서비스 저작 통합 S/W(IDE:Script Language/Service Package) - University of Seoul
- [T5] 사용자 평가(User Evaluation) - Ewha womans University
- [T6] 태스크 관리, 소셜지식 관리 및 서비스 시나리오(Task Manager & Service Scenario) - Korea Institute of Science and Technology, sHRI-Lab
Reference Video
Reference Repository(Private)
If you are interested in these sources, Please send mail to the following address.
- Personality Recognition for Social Perception, Github-Repository
- Robot Framework for HRI, Github-Repository